ABSTRACT
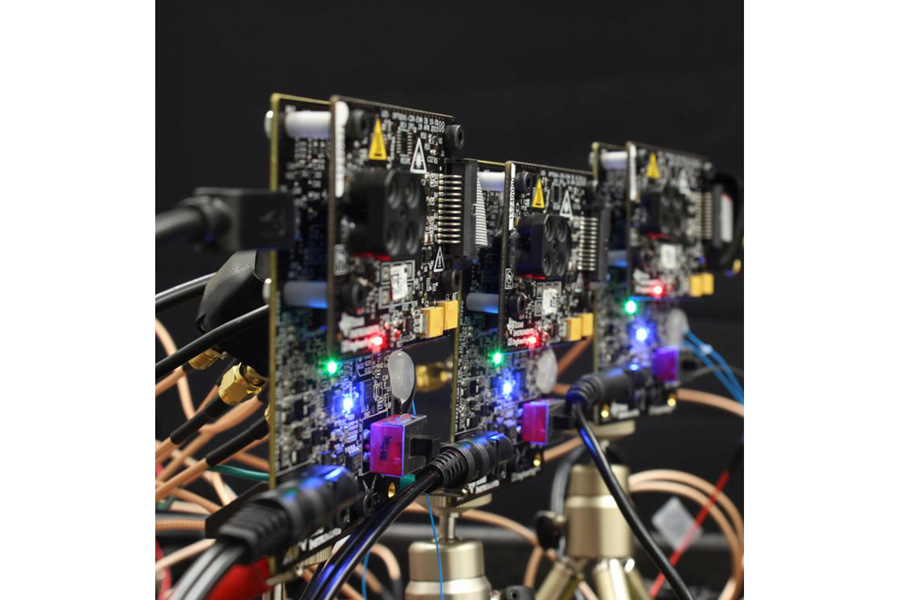
Depth cameras are a ubiquitous technology used in a wide range of applications, including robotic and machine vision, human-computer interaction, autonomous vehicles as well as augmented and virtual reality. In this paper, we explore the design and applications of phased multi-camera time-of-flight (ToF) systems. We develop a reproducible hardware system that allows for the exposure times and waveforms of up to three cameras to be synchronized. Using this system, we analyze waveform interference between multiple light sources in ToF applications and propose simple solutions to this problem. Building on the concept of orthogonal frequency design, we demonstrate state-of-the-art results for instantaneous radial velocity capture via Doppler time-of-flight imaging and we explore new directions for optically probing global illumination, for example by de-scattering dynamic scenes and by non-line-of-sight motion detection via frequency gating.