ABSTRACT
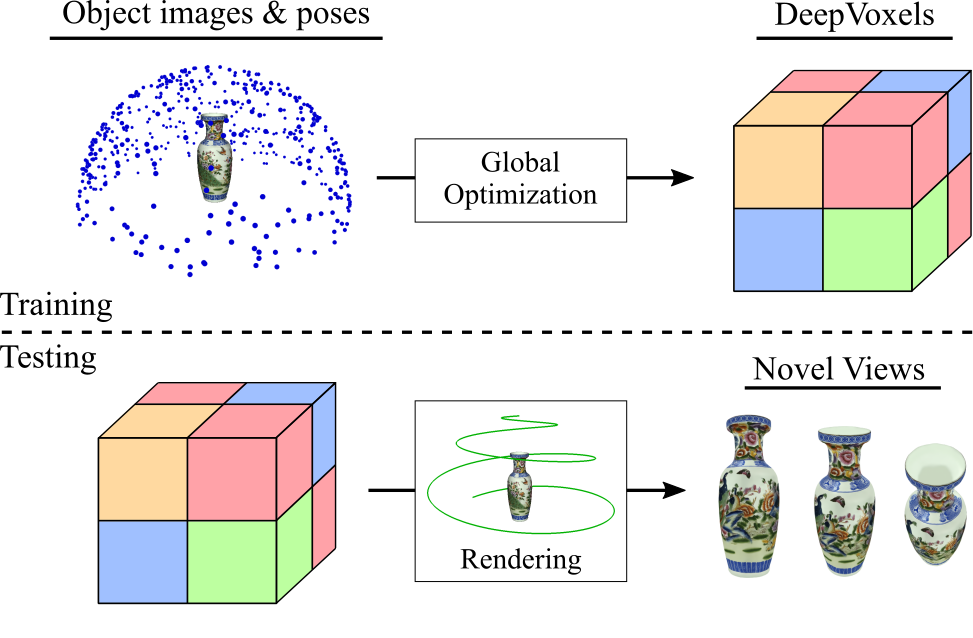
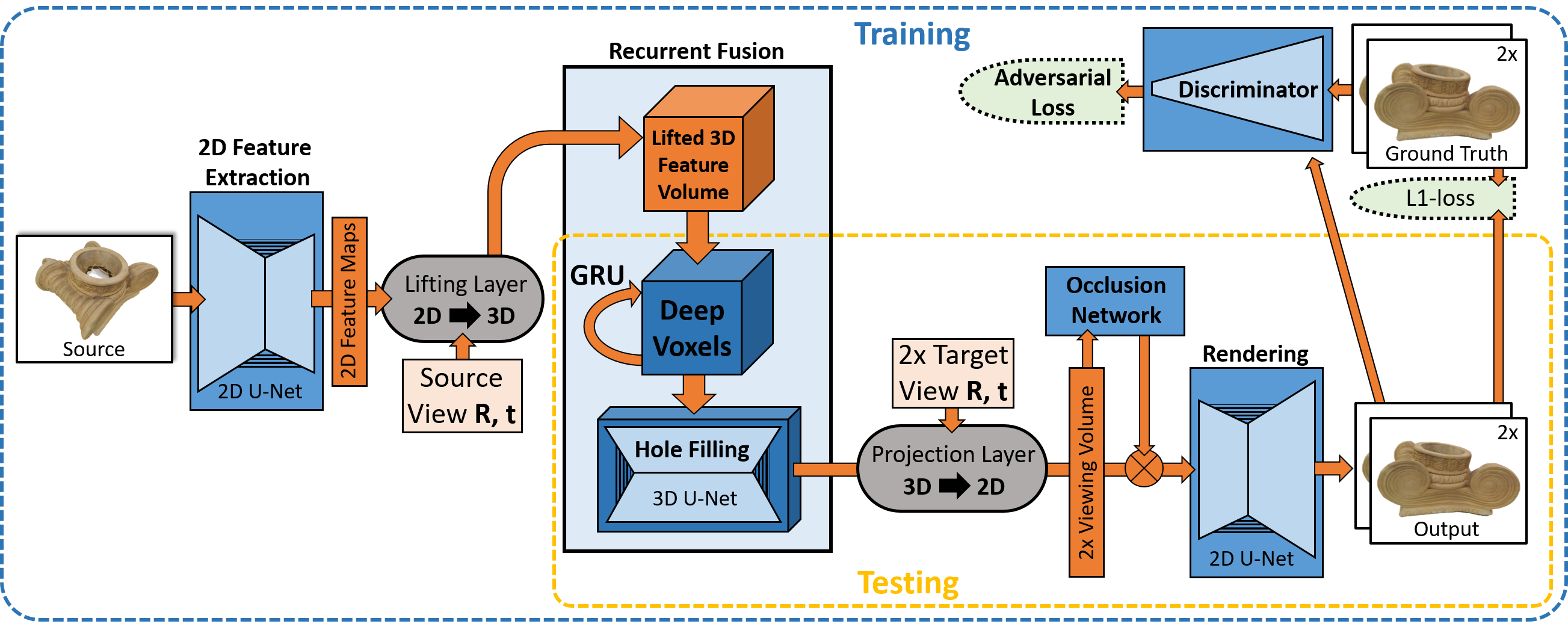
In this work, we address the lack of 3D understanding of generative neural networks by introducing a persistent 3D feature embedding for view synthesis. To this end, we propose DeepVoxels, a learned representation that encodes the view-dependent appearance of a 3D scene without having to explicitly model its geometry. At its core, our approach is based on a Cartesian 3D grid of persistent embedded features that learn to make use of the underlying 3D scene structure. Our approach combines insights from 3D geometric computer vision with recent advances in learning image-to-image mappings based on adversarial loss functions. DeepVoxels is supervised, without requiring a 3D reconstruction of the scene, using a 2D re-rendering loss and enforces perspective and multi-view geometry in a principled manner. We apply our persistent 3D scene representation to the problem of novel view synthesis demonstrating high-quality results for a variety of challenging scenes.